זרועות רובוטיות SCARA – זרוע רובוטית שיתופית Z-Arm-4160B





קטגוריה ראשית
זרוע רובוט תעשייתית / זרוע רובוט שיתופית / תופסן חשמלי / מפעיל חכם / פתרונות אוטומציה
בַּקָשָׁה
קובוטים מדגם SCIC Z-Arm הם רובוטים שיתופיים קלים משקל בעלי 4 צירים עם מנוע הנעה מובנה בתוכם, והם אינם זקוקים עוד למפחיתים כמו רובוטים מסורתיים אחרים מסוג Scara, מה שמפחית את העלות ב-40%. קובוטים מדגם SCIC Z-Arm יכולים לממש פונקציות הכוללות, אך לא רק, הדפסה תלת-ממדית, טיפול בחומרים, ריתוך וחריטת לייזר. הם מסוגלים לשפר משמעותית את היעילות והגמישות של העבודה והייצור שלכם.
תכונות

דיוק גבוה
הֲדִירוּת
±0.02 מ"מ
ציר Z מותאם אישית
0.1-0.8 מטר
מטען גדול
מעמד 4 ק"ג
מקסימום 5 ק"ג
מהירות גבוהה יותר
מהירות ליניארית מקסימלית 2 מטר/שנייה
(עומס עמידה 5 ק"ג)
מוטת זרוע גדולה, זרוע רובוטית בעלת 4 צירים בדיוק גבוה וקלה לשימוש
דיוק גבוה
חזרתיות: ±0.02 מ"מ
מוטת זרוע גדולה
ציר J1: 325 מ"מ,ציר J2: 275 מ"מ
ציר Z מותאם אישית
ניתן להתאים את אורך הקו למעלה ולמטה בין 0.1 מטר ל-0.8 מטר
חוסך מקום
הכונן/בקר מובנה
פשוט וקל לשימוש
גם למתחילים שלא מכירים זרוע רובוטית יכול להיות קל לשימוש, הממשק נפתח.
מהירות גבוהה
המהירות שלו היא 2000 מ"מ/שנייה תחת עומס של 4 ק"ג

מוצרים קשורים



פרמטר מפרט
ה-SCIC Hitbot Z-Arm 4160B תוכנן על ידי SCIC Tech, זהו רובוט שיתופי קל משקל, קל לתכנות ולשימוש, תומך ב-SDK. בנוסף, הוא תומך בזיהוי התנגשויות, כלומר, הוא עוצר אוטומטית בעת נגיעה בבני אדם, מה שמאפשר שיתוף פעולה חכם בין אדם למכונה, והאבטחה גבוהה.
| זרוע רובוטית שיתופית Z-Arm 4160B | פרמטרים |
| אורך זרוע ציר אחד | 325 מ"מ |
| זווית סיבוב של ציר אחד | ±90° |
| אורך זרוע 2 צירים | 275 מ"מ |
| זווית סיבוב של 2 צירים | ±164° אופציונלי: 15-345 מעלות |
| מהלך ציר Z | ניתן להתאים אישית את גובה 410 |
| טווח סיבוב ציר R | ±1080° |
| מהירות ליניארית | 2000 מ"מ/שנייה (משקל מטען 4 ק"ג) |
| הֲדִירוּת | ±0.02 מ"מ |
| מטען סטנדרטי | 4 ק"ג |
| מטען מקסימלי | 5 ק"ג |
| דרגת חופש | 4 |
| ספק כוח | 220V/110V50-60HZ התאמה להספק שיא של 48VDC 960W |
| תִקשׁוֹרֶת | אתרנט |
| יכולת הרחבה | בקר תנועה משולב מובנה מספק 24 כניסות/פלטים + הרחבה מתחת לזרוע |
| ניתן להתאים אישית את גובה ציר ה-Z | 0.1 מטר ~ 0.8 מטר |
| לימוד גרירת ציר Z | / |
| ממשק חשמלי שמור | תצורה סטנדרטית: חוטים 24*23awg (לא מסוככים) מלוח השקעים דרך כיסוי הזרוע התחתונה אופציונלי: 2 צינורות ואקום φ4 דרך לוח השקע והאוגן |
| תופסנים חשמליים תואמים של HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| אור נשימה | / |
| טווח תנועה של הזרוע השנייה | סטנדרטי: ±164° אופציונלי: 15-345 מעלות |
| אביזרים אופציונליים | / |
| שימוש בסביבה | טמפרטורת סביבה: 0-45°C לחות: 20-80% לחות יחסית (ללא כפור) |
| קלט דיגיטלי של יציאת I/O (מבודד) | 9+3+ הארכת זרוע (אופציונלי) |
| יציאת קלט/פלט דיגיטלית (מבודדת) | 9+3+ הארכת זרוע (אופציונלי) |
| קלט אנלוגי של יציאת I/O (4-20mA) | / |
| יציאת קלט/פלט אנלוגית (4-20mA) | / |
| גובה זרוע הרובוט | 860 מ"מ |
| משקל זרוע הרובוט | משקל נקי של 36.5 ק"ג, אורך 410 מ"מ |
| גודל בסיס | 250 מ"מ * 250 מ"מ * 15 מ"מ |
| מרחק בין חורי חיבור הבסיס | 200 מ"מ * 200 מ"מ עם ארבעה ברגים M8 * 20 |
| זיהוי התנגשויות | √ |
| הוראת דראג | √ |
בחירה אידיאלית למשימות הרכבה קלות משקל
Z-Arm XX60B היא זרוע רובוטית בעלת 4 צירים עם מוטת זרוע גדולה, התופסת שטח קטן, מתאימה מאוד להצבה על תחנת עבודה או בתוך מכונה, זוהי בחירה אידיאלית למשימות הרכבה קלות משקל.


קל משקל עם זווית סיבוב גדולה

משקל המוצר הוא כ-36.5 ק"ג, העומס המרבי שלו יכול להיות עד 5 ק"ג, זווית הסיבוב של ציר אחד היא ±90°, זווית הסיבוב של ציר שני היא ±164°, טווח הסיבוב של ציר R יכול להיות עד ±1080°.
מוטת זרוע גדולה, יישום רחב

ל-Z-Arm XX60B מוטת זרוע ארוכה, אורך ציר אחד הוא 325 מ"מ, אורך ציר שני הוא 275 מ"מ, ומהירותה הליניארית יכולה להגיע עד 2000 מ"מ/שנייה תחת עומס של 4 ק"ג.


גמיש לפריסה, מהיר למעבר
ל-Z-Arm XX60B מאפיינים של קל משקל, חוסך מקום וגמישות לפריסה, הוא מתאים לפריסה ביישומים רבים, והוא לא ישנה את פריסת הייצור הקודמת, כולל החלפת רצף תהליכים מהירה וייצור של קבוצות קטנות שלמות וכו'.
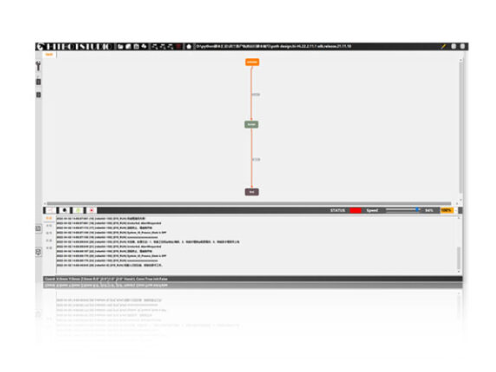
גרור לימוד להשלמת התוכנית

התוכנה מבוססת על עיצוב גרפי, היא סיפקה מודולים של נקודה, אות פלט, תופס חשמלי, מגש, השהייה, תהליך משנה, איפוס ומודולים פונקציונליים בסיסיים אחרים, משתמשים יכולים לגרור את המודול כדי לשלוט בזרוע הרובוט באזור התכנות, הממשק פשוט, אך הפונקציונליות עוצמתית.
טווח תנועה גרסת M1 (סיבוב החוצה)
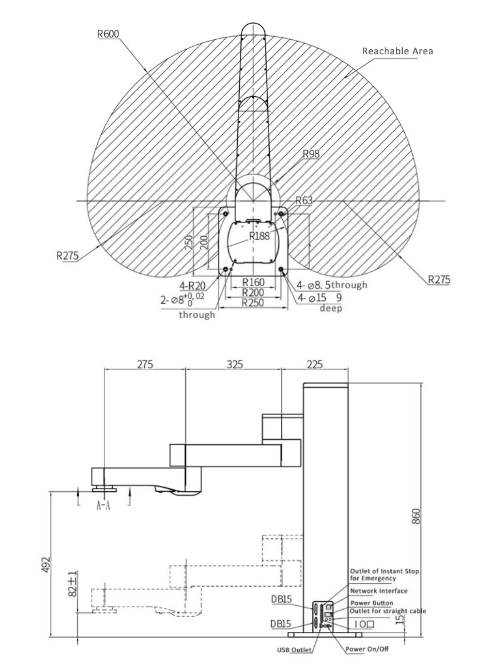
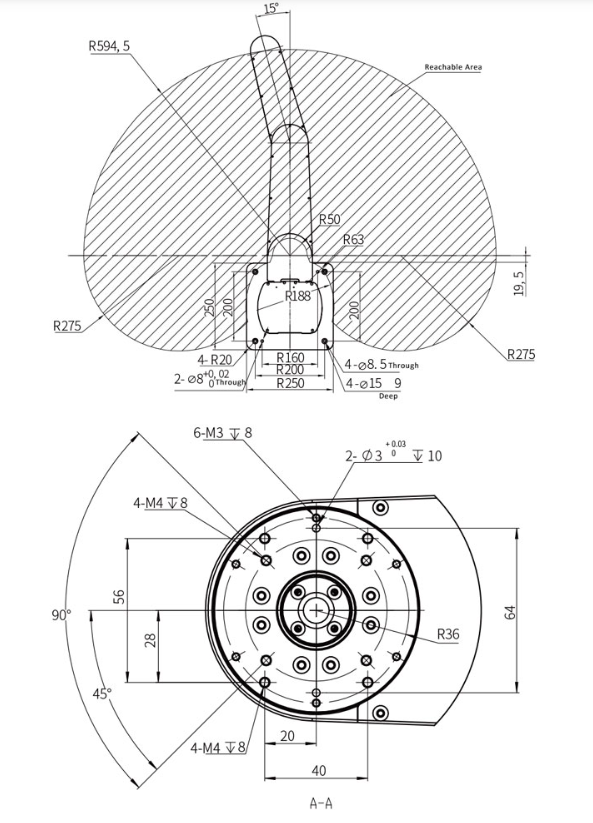
המלצה למחבר DB15

דגם מומלץ: זכר מצופה זהב עם מעטפת ABS YL-SCD-15M נקבה מצופה זהב עם מעטפת ABS YL-SCD-15F
תיאור גודל: 55 מ"מ * 43 מ"מ * 16 מ"מ
(ראה איור 5)
תרשים של סביבת השימוש החיצונית של זרוע הרובוט

העסק שלנו


קטגוריות מוצרים
-

סדרת מחליף מהיר – QC-150 עגול ידני...
-

רובוטי הרמה - רובוט הרמה סיבובי SJV...
-

מלגזה חכמה – SFL-CDD14-CE לייזר SLAM ...
-

סדרת קובוטים מבוססי בינה מלאכותית TM – קובוט בינה מלאכותית בעל 6 צירים TM12M
-

סדרת קובוטים מבוססי בינה מלאכותית TM – קובוט בינה מלאכותית בעל 6 צירים TM16M
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-30 Paral...