סדרת תופסנים חשמליים HITBOT – תופסן חשמלי סיבובי Z-ERG-20




קטגוריה ראשית
זרוע רובוט תעשייתית / זרוע רובוט שיתופית / תופסן חשמלי / מפעיל חכם / פתרונות אוטומציה
בַּקָשָׁה
תופסי הרובוט מסדרת SCIC Z הם בגודל קטן עם מערכת סרוו מובנית, המאפשרת להשיג שליטה מדויקת במהירות, מיקום וכוח הידוק. מערכת האחיזה המתקדמת של SCIC לפתרונות אוטומציה תאפשר לכם לפתוח אפשרויות חדשות לאוטומציה של משימות שמעולם לא חשבתם שאפשריות.
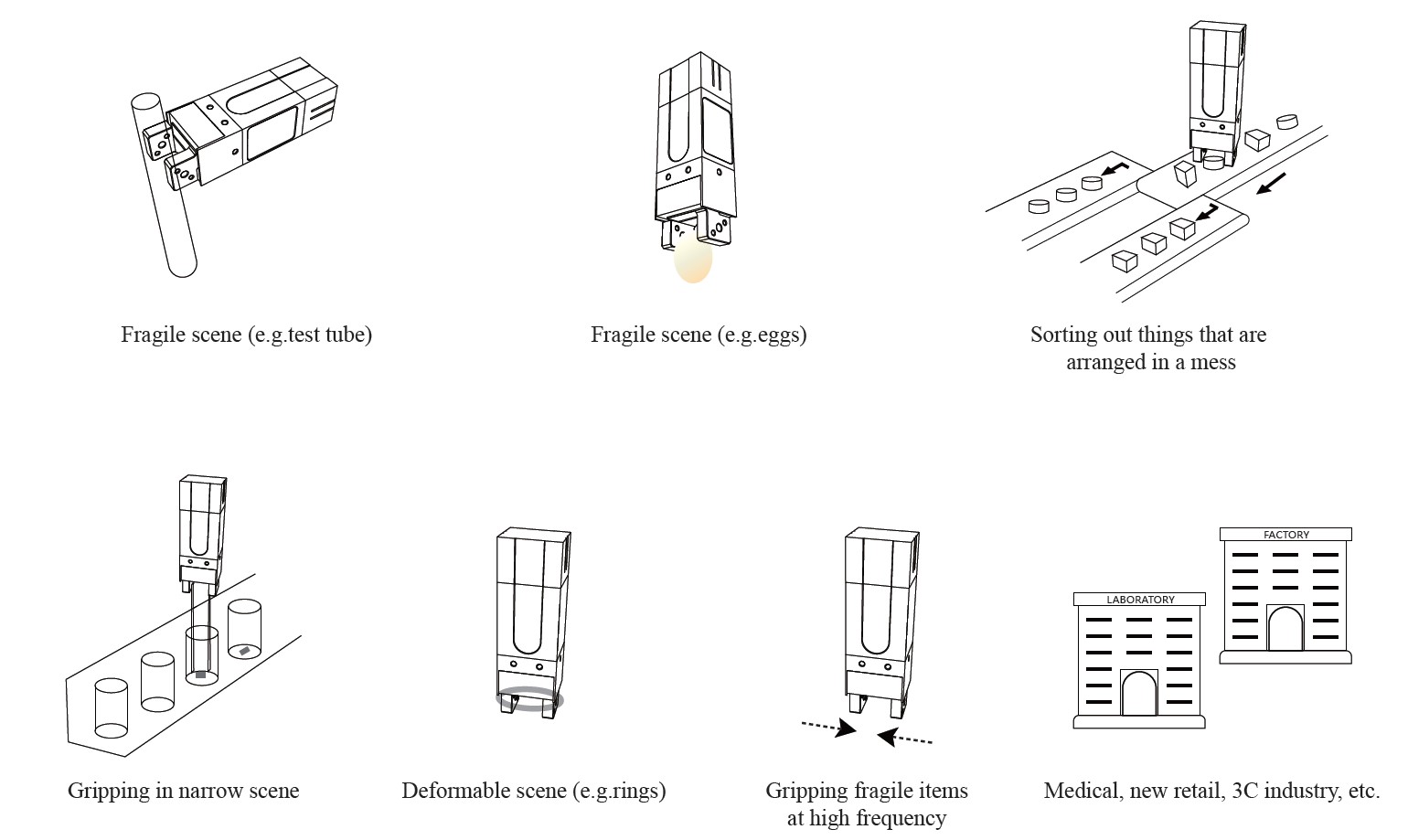
תכונה

· תמיכה בסיבוב אינסופי וסיבוב יחסי, ללא טבעת החלקה, עלות תחזוקה נמוכה
· ניתן לשלוט במדויק על כוח הסיבוב והאחיזה, המיקום והמהירות
חיי שירות ארוכים, מחזורים מרובים, ביצועים טובים יותר מאשר תופסן פרנומטי
· בקר מובנה: תופס מקום קטן וקל לשילוב
· מצב בקרה: תמיכה בבקרת אפיק Modbus וקלט/פלט



פרמטר מפרט
המניפולטור Z-ERG-20 קל לעבודה עם אנשים ותומך באחיזה רכה. התפס החשמלי משולב היטב ויש לו יתרונות רבים:
●תמיכה בסיבוב אינסופי וסיבוב יחסי, ללא טבעת החלקה, עלות תחזוקה נמוכה.
●ניתן לשלוט במדויק על סיבוב, כוח הידוק, מקדחה ומהירות.
●אורך חיים ארוך: עשרות מיליון מעגלים, טוב יותר ממדחסי אוויר.
●בקר מובנה, לחיסכון במקום, קל לשילוב.
●מצב בקרה: תמיכה בבקרת Modbus וקלט/פלט.
| מספר דגם Z-ERG-20 | פרמטרים |
| שבץ כולל | 20 מ"מ מתכוונן |
| כוח אחיזה | מתכוונן 10-35N |
| הֲדִירוּת | ±0.2 מ"מ |
| משקל אחיזה מומלץ | ≤0.4 ק"ג |
| מצב שידור | מתקן הילוכים + מדריך ליניארי |
| מילוי שומנים של רכיבים נעים | כל שישה חודשים או מיליון תנועות / פעם |
| זמן תנועת שבץ חד כיווני | 0.20 שניות |
| מומנט מקסימלי מסתובב | 0.3 ניוטון מטר |
| מהירות סיבוב מקסימלית | 240 סל"ד |
| טווח סיבוב | סיבוב אינסופי |
| תגובה סיבובית | ±1° |
| מִשׁקָל | 1.0 ק"ג |
| מידות | 54*54*141 מ"מ |
| מתח הפעלה | 24V±10% |
| זרם מדורג | 1.5A |
| זרם מקסימלי | 3A |
| כּוֹחַ | 50W |
| דרגת הגנה | IP20 |
| סוג מנוע | מנוע סרוו |
| טווח טמפרטורות הפעלה | 5-55 ℃ |
| טווח לחות הפעלה | RH35-80 (ללא כפור) |
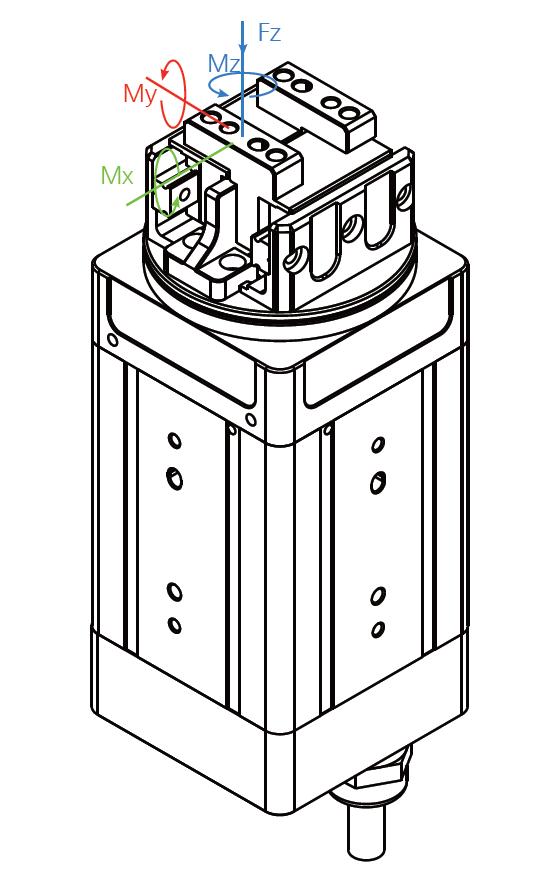
| עומס סטטי מותר בכיוון אנכי | |
| פ.ז.: | 100N |
| מומנט מותר | |
| מקסימום: | 1.35 ניוטון מטר |
| שֶׁלִי: | 0.8 ניוטון מטר |
| מ.ז.: | 0.8 ניוטון מטר |
קיזוז מרכז כובד עומס
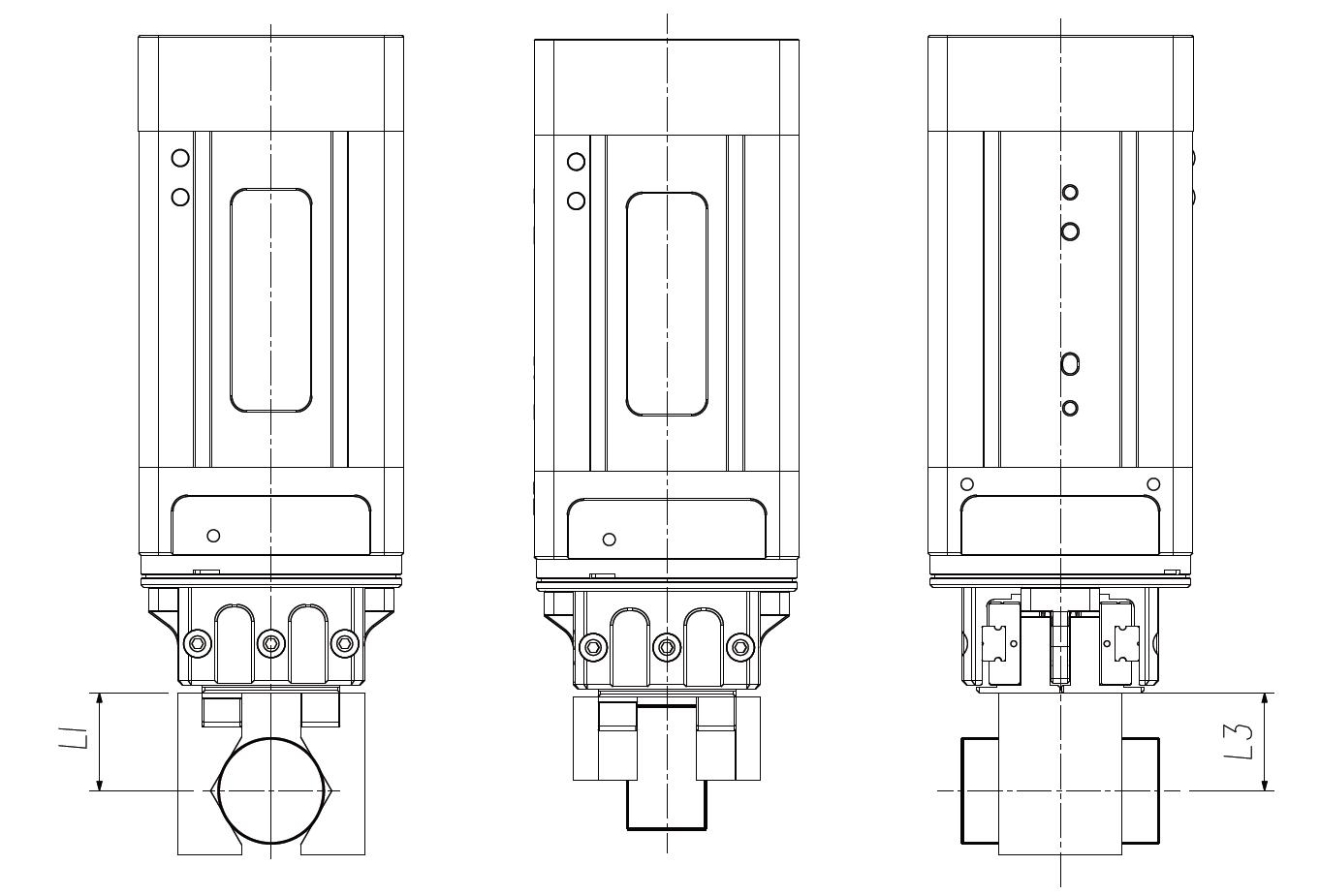
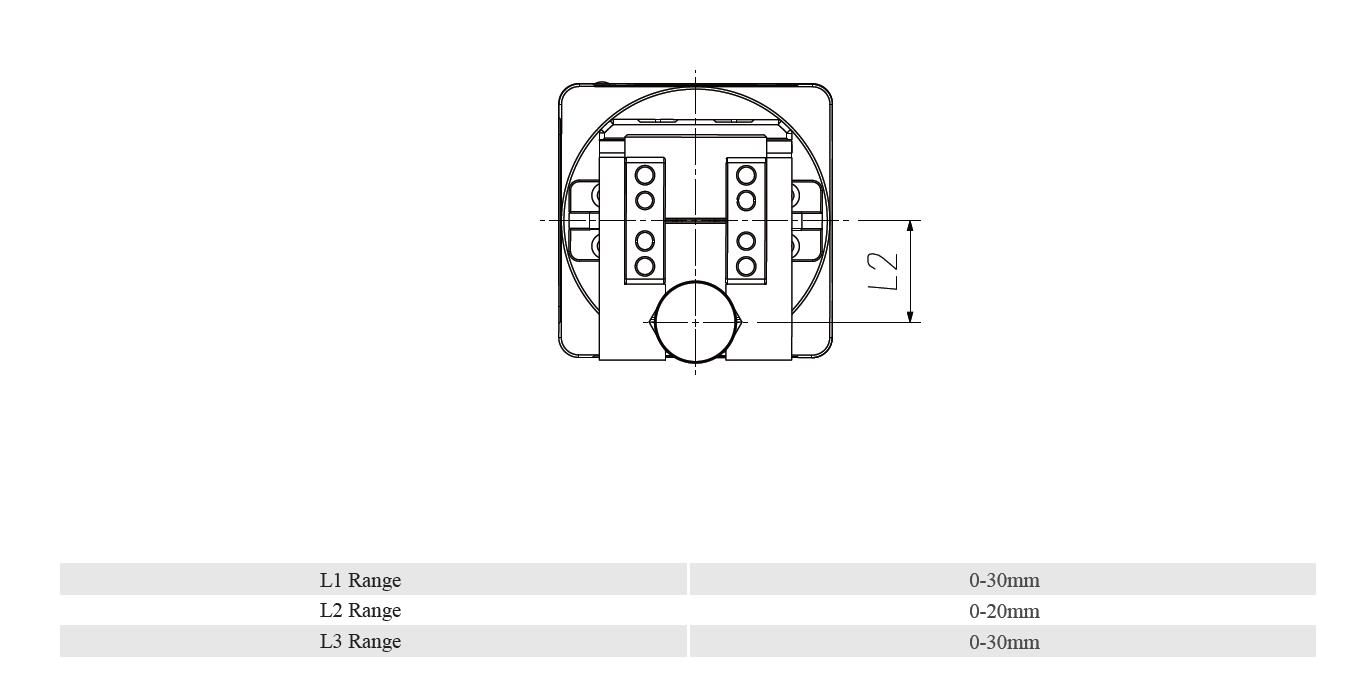
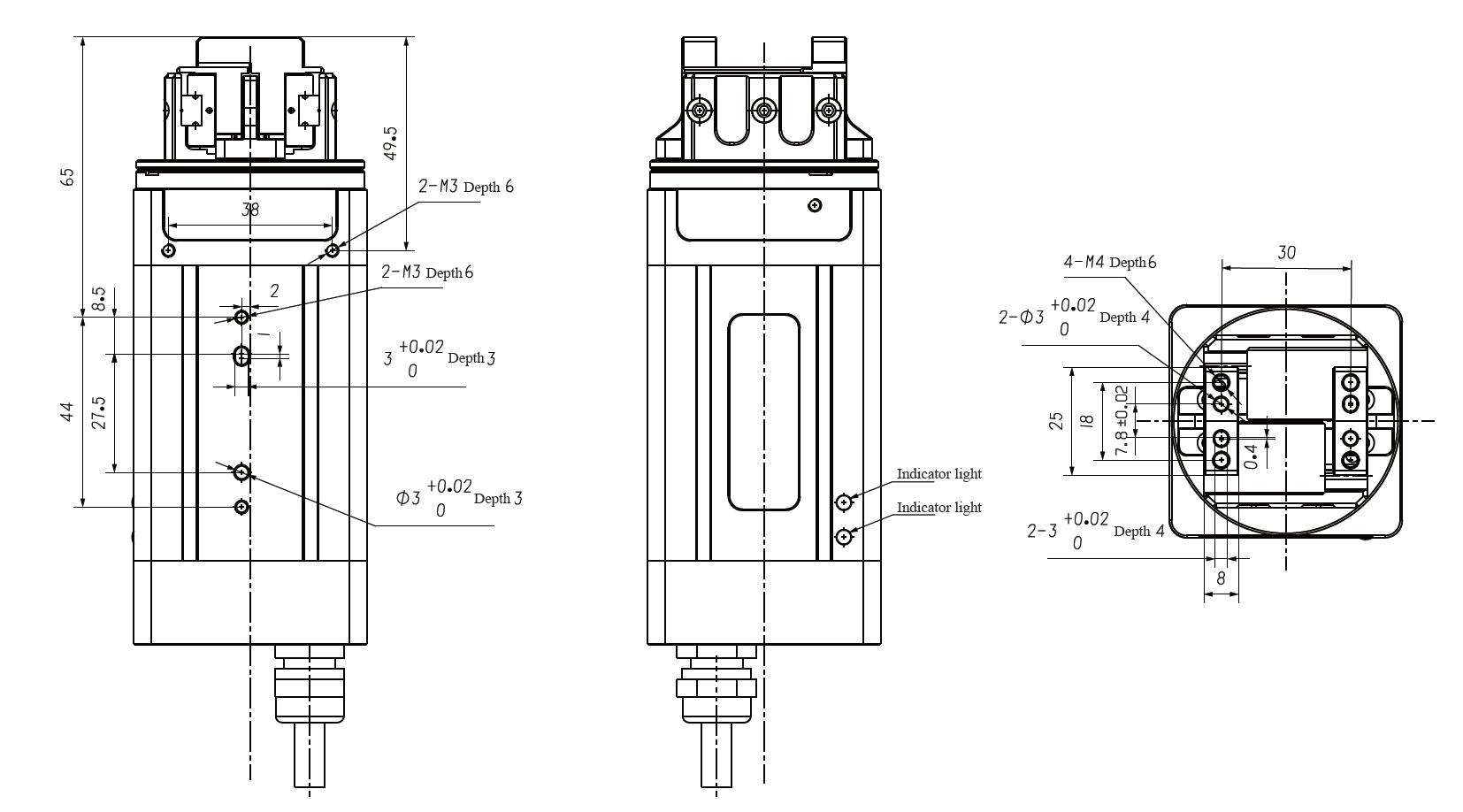
תרשים התקנה ממדים
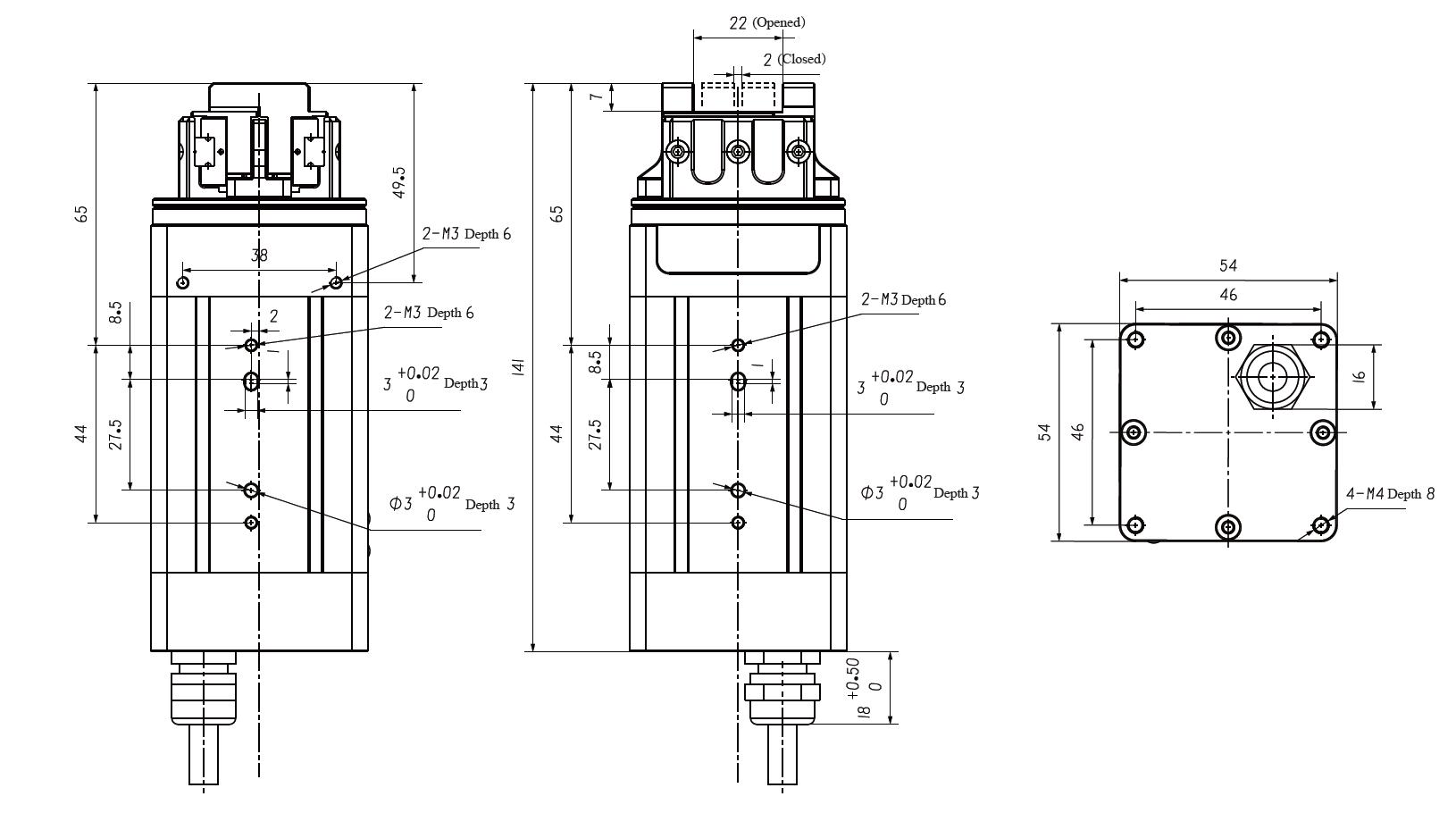
① תקע תעופה בעל חמישה ליבות RKMV8-354 ל- RKMV8-354
② מהלך התפס החשמלי הוא 20 מ"מ
③ מיקום התקנה, השתמשו בשני ברגים M6 כדי לחבר אותם לאוגן שבקצה זרוע הרובוט UR
④ מיקום התקנה, מיקום התקנת גוף התאורה (בורג M6)
⑤ מיקום התקנה, מיקום התקנת גוף התאורה (3 חורי פינים גליליים)
העסק שלנו







