מחולל ואקום פנאומטי רך עם שתי אצבעות לאוטומציה של רובוטים



מחולל ואקום פנאומטי רך עם שתי אצבעות לאוטומציה של רובוטים
קטגוריה ראשית
זרוע רובוט תעשייתית / זרוע רובוט שיתופית / תופסן חשמלי / מפעיל חכם / פתרונות אוטומציה
בַּקָשָׁה

תופסי הרובוט מסדרת SCIC Z-EFG הם בגודל קטן עם מערכת סרוו מובנית, המאפשרת להשיג שליטה מדויקת במהירות, מיקום וכוח הידוק. מערכת האחיזה המתקדמת של SCIC לפתרונות אוטומציה תאפשר לכם לפתוח אפשרויות חדשות לאוטומציה של משימות שמעולם לא חשבתם שאפשריות.
תכונה
· משיכה גדולה
· כוח הידוק מתכוונן ומהלך מתכוונן
· חיים ארוכים: עשרות מיליוני מחזורים, עולים על טפרי אוויר
בקר מובנה: גודל קטן, שילוב קל
בקרת אפיק EIA485, קלט/פלט
כוח הידוק: 40-130N, צורת Y של תופסן חשמלי עם מהלך 120 מ"מ
משיכה ארוכה
מהלך כולל: 120 מ"מ
מצב בקרה
485 מודבוס, EIA485, בקרת אפיק
כוח הידוק
כוח הידוק 40-130N מתכוונן
בקר בפנים
שטח קטן, קל לשילוב
בקרת דיוק
חזרתיות: ±0.02 מ"מ
הידוק רך
זה יכול להדק חפצים שבירים ועיוותים

● קידום מהפכה בהחלפת תופסנים פנאומטיים בתפסנים חשמליים, התפסן החשמלי הראשון עם מערכת סרוו משולבת בסין.
● תחליף מושלם למדחס אוויר + פילטר + שסתום סולנואיד + שסתום מצערת + תופסן פנאומטי
● חיי שירות מרובים של מחזורים, בהתאם לצילינדר היפני המסורתי



פרמטר מפרט
| מספר דגם Z-EFG-130 | פרמטרים |
| סַך הַכֹּל שָׁבָץ | 120 מ"מ |
| כוח אחיזה | 40-130N |
| הֲדִירוּת | ±0.02 מ"מ |
| משקל אחיזה מומלץ | מקסימום 1 ק"ג |
| הפצה מצב | אום בורג + קישור |
| מילוי שומנים של רכיבים נעים | כל שישה חודשים או מיליון תנועות / פעם |
| זמן תנועת שבץ חד כיווני | 0.9 שניות |
| טווח טמפרטורות הפעלה | 5-55 ℃ |
| טווח לחות הפעלה | RH35-80(אין כפור) |
| מצב תנועה | הַצמָדָה |
| בקרת שבץ | מתכוונן |
| כוונון כוח ההידוק | מתכוונן |
| מִשׁקָל | 0.8 ק"ג |
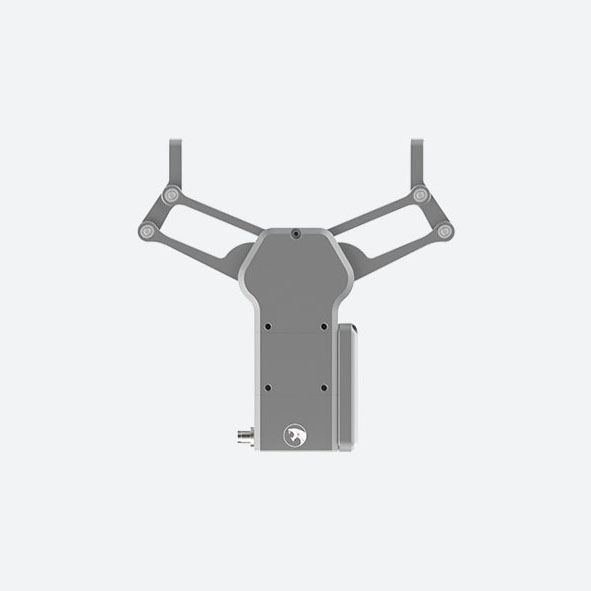
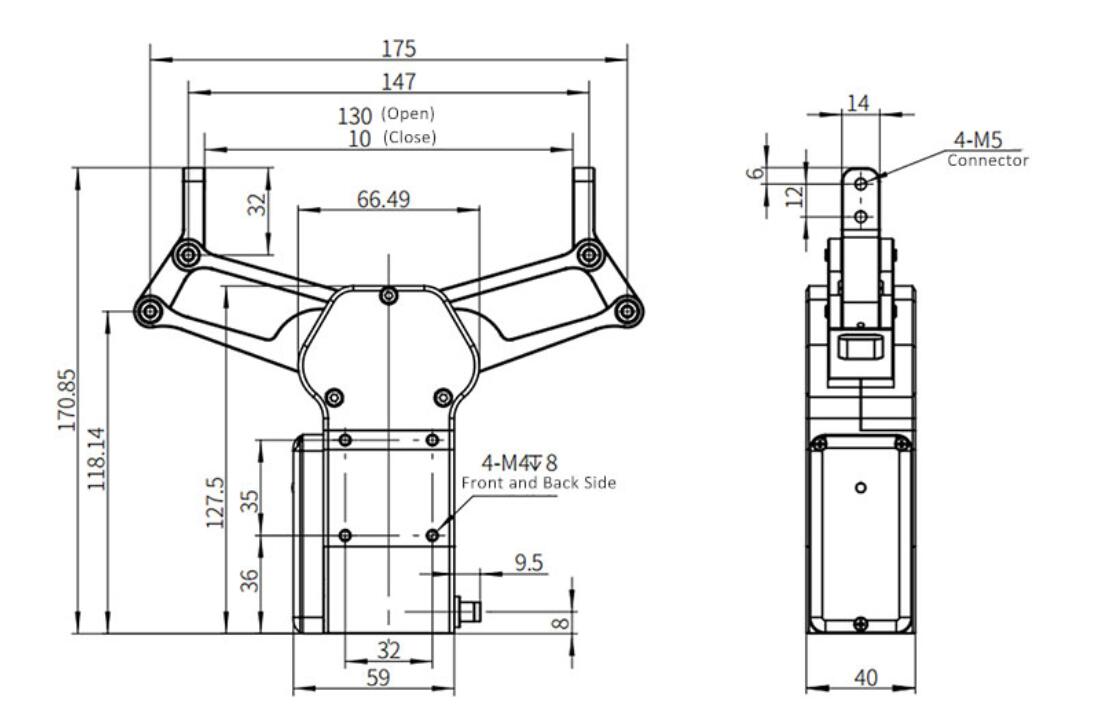
| מידות(אורך*רוחב*גובה) | 171*187*40 מ"מ (פתוח) 218*66.5*40 מטר (סגור) |
| מיקום הבקר | מובנה |
| כּוֹחַ | 10W |
| סוג מנוע | ללא מברשות DC |
| זרם שיא | 2A |
| מתח מדורג | 24V |
| זרם המתנה | 0.4A |
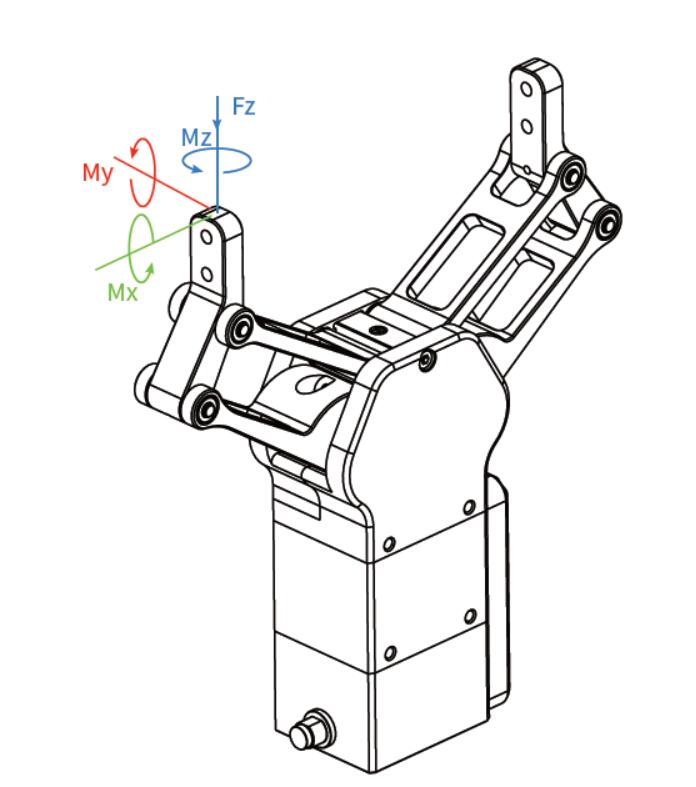
| עומס סטטי מותר בכיוון אנכי | |
| פ.ז.: | 200N |
| מומנט מותר | |
| מקסימום: | 2 ניוטון מטר |
| שֶׁלִי: | 2 ניוטון מטר |
| מ.ז.: | 2 ניוטון מטר |
חבר והפעל, נוח לשילוב
תופסן חשמלי Z-EFG-130 יכול להיות תואם לזרוע רובוטית שיתופית, ויש לו מערכת סרוו משולבת בפנים, רק תופסן אחד יכול להיות שווה למדחס + מסנן + שסתום סולנואיד + שסתום מצערת + תופסן אוויר.


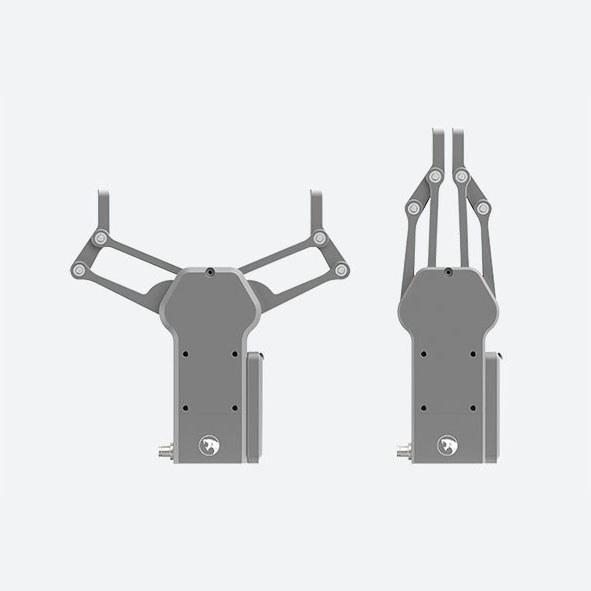
מהלך ארוך, תאימות מצוינת
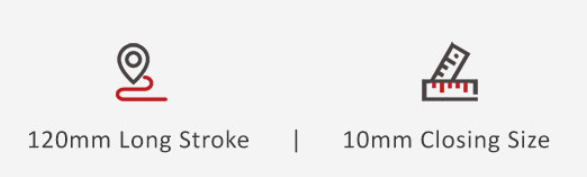
מהלך יעיל של תופסן חשמלי יכול להיות עד 120 מ"מ, גודל הסגירה שלו הוא 10 מ"מ, ניתן להשתמש בתפסן החשמלי עבור שבבי מוליכים למחצה, אלקטרוניקה 3C ותעשיות דיוק אחרות וכו'.
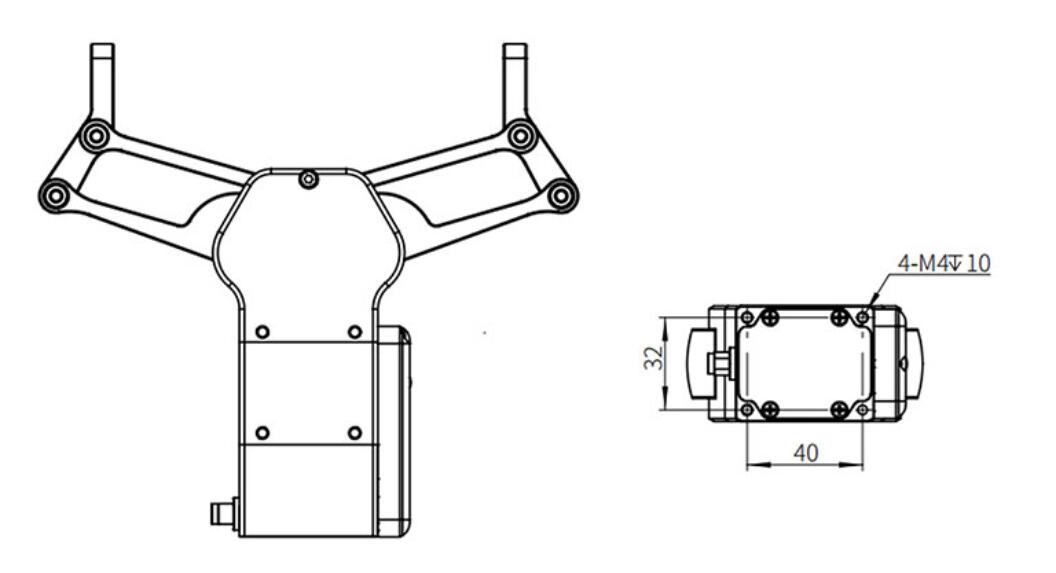
גודל קטן, נוח לשילוב

גודל הפתיחה של ה-Z-EFG-130 הוא 171*187*40 מ"מ, גודל הסגירה הוא 218*66.5*40 מ"מ, זהו מבנה קומפקטי, תומך בסוגי התקנה מרובים, זהו בקר פנימי, שטח מכוסה קטן.

בקרת כוח דיוק
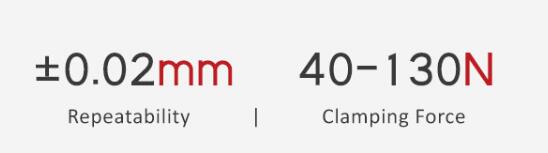
התפס החשמלי משתמש בתכנון תיבת הילוכים מיוחד ופיצוי אלגוריתם הנעה, כוח ההידוק מתכוונן בין 40-130N, משקל ההידוק המוצע ≤1 ק"ג, והוא יכול להשיג חזרתיות של ±0.02 מ"מ.
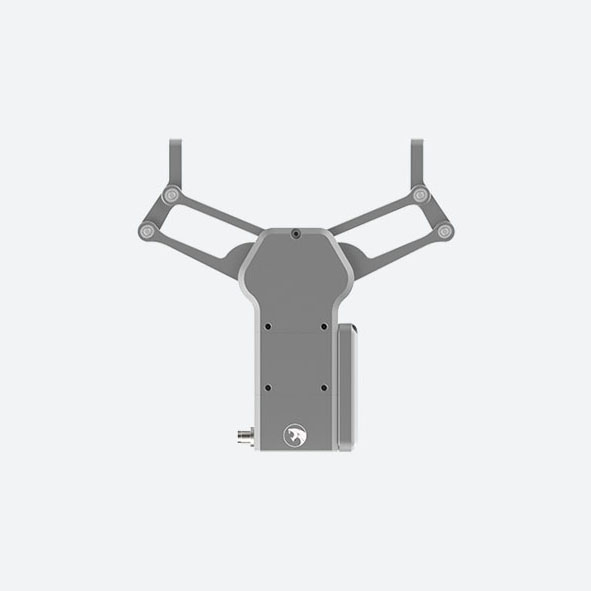
אחיזה אדפטיבית, זנב ניתן לשינוי

התפס החשמלי של Z-EFG-130 תומך בהידוק אדפטיבי, הוא מתאים יותר לאובייקטים עגולים, כדוריים או בעלי צורה מיוחדת, ניתן לשנות את חלקי הזנב שלו בקלות, הלקוחות יכולים להדק את האובייקטים בהתאם לדרישותיהם.


מרובה מצבי בקרה, קל לתפעול

ניתן לשלוט בדיוק התפס החשמלי באמצעות Modbus, התצורה שלו פשוטה, כדי להשתמש בפרוטוקול התקשורת של קלט/פלט דיגיטלי, נדרש רק כבל אחד לחיבור להפעלה/כיבוי, הוא תואם למערכת הבקרה הראשית של PLC.
קיזוז מרכז כובד עומס
העסק שלנו


קטגוריות מוצרים
-

מחיר תחרותי רובוט תעשייתי מניפולציה 6 צירים
-

תעשייה במהירות גבוהה ביצים פירות לקטוף ולמקם 4...
-

זרוע רובוטית שיתופית בעלת שישה צירים של Dobot, מפרקית...
-

מניפולטור טלסקופי של זרוע רובוטית ארוכה של הצבא 20...
-
זרוע רובוטית מתכתית בעלת 6 צירים למכירה חמה, רובוטית מכנית...
-

מניפולטור רובוט תעשייתי עם זרוע 4 צירים...